全国服务热线:
0755-23227057
0755-23227057
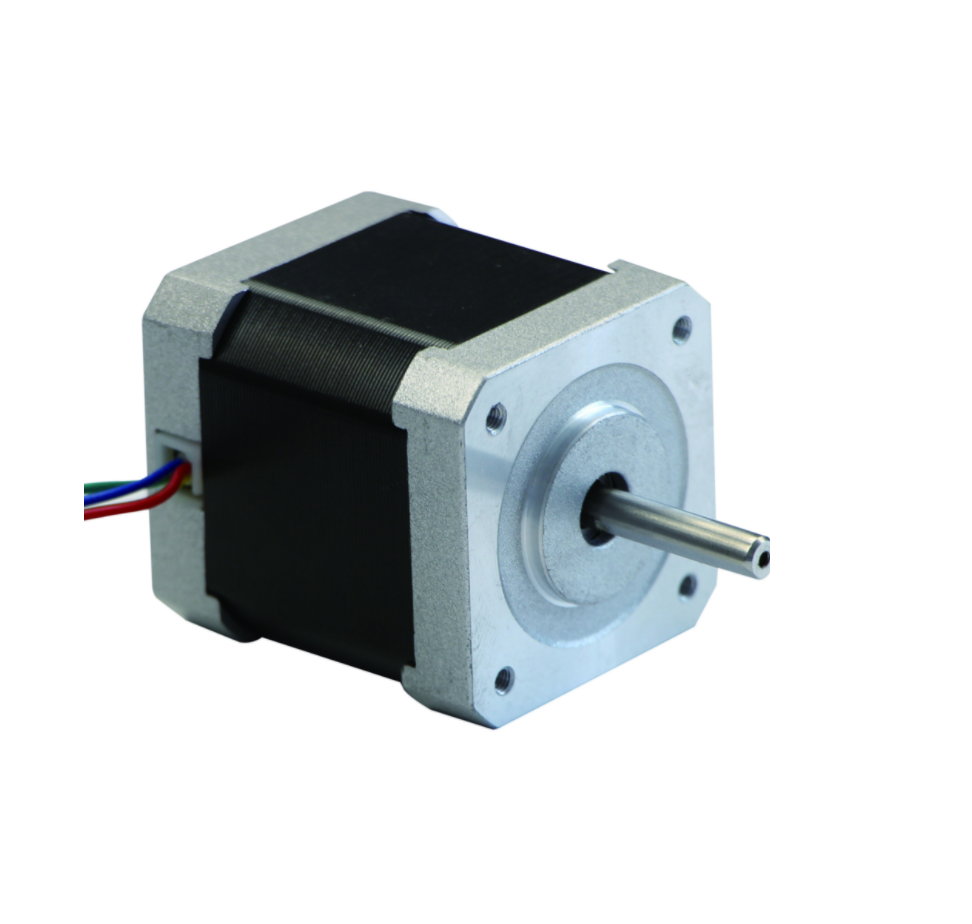
步进电机是众多电机中的一种,并且是相对来说比较特殊的一种电机,不论是工作原理还是使用都与普通电机存在区别,是在早期的普通电机出现之后开始研发出来并逐渐推广应用的。本文来就此种电机的产生与发展,为大家做一下简单的介绍:步进电机的原始模型是起源的时间比较早,二十世纪初在电话自动交换机中就广泛使用了步进电机。在西方资本主义列强争夺殖民地这个社会报警下,步进电机在缺乏交流电源的船舶和飞机等独立系统中得到了广泛的使用。到二十世纪五十年代后期,晶体管被发明出来,开始逐渐应用在这种电机上,是的电机对于数字化的控制变得简单。
如此发展到八十年代后,廉价的微型计算机开始出现,凭借着有多种功能的微型计算机步进电机的控制方式更加灵活多样,如此一来电机的技术及品质水平得到了有效的提升,应用也越来越广泛。电机为工业发展不可缺少的一大要素,并扮演着重要的角色。电机的应用不仅在动力应用反面不断扩大,而且在控制领域的使用范围也在不断扩大。随着控制电机重要性的增加,控制电机的使用量也逐年增加。步进电机是一种控制电机,不使用反馈回路,就能进行速度控制及定位控制,即所谓的电机开环控制,不使用反馈回路,其应用主要以处理办公业务能力很强的OA(OfficeAutomation,办公自动化)机器和FA(FactoryAutomation工厂自动化)机器为核心,并广泛的应用于医疗器械、计量仪器、汽车、游戏机等。就数量来讲,OA机器方面的应用约占步进电机使用总数的75%。虽然步进电机最近被大量应用,但其原理早已有之。步进电机与电磁铁和柱塞泵同一时期开发,法国人佛罗曼提出了将电磁铁的吸引力转化为旋转力矩的方法。
当时,激磁相的切换用机械凸轮的接触点来完成,这就是步进电机的原型。现在还有旋转线圈式的应用方法。1920年步进电机的实际应用才开始,称为VR型步进电机,被英国海军用作定位控制和远程遥控。混合式HB(Hybrid的缩写,是VR与PM复合的意思)型步进电机的产生,大约在1952年,由美国GE公司的KarlFeiertag开发的发电机演变而来。与现在的两相HB型步进电机结构相同,取得了US专利。当初作为低速同步电机使用,其后,由美国的SuperiorElectric公司和SigmaInstruments公司开发出两相1.8°步距角的HB型步进电机。
当时因为电流小、电感大、恒电驱动的关系,换相脉冲只有300pps。另一方面,从驱动电路方面看,步进电机的发展与晶体管半导体元件的发展密不可分。1950年研制出二极管半导体,1964年开发出MOS半导体,1965年出现IC,1967年LSI使用化。特别是经过1950~1965年间半导体材料的高速发展,进入20世纪70年代,由于价格便宜,可靠性高的逻辑数字电路得到广泛应用,使步进电机的使用量急剧增加。日本东京大学的大岛氏,在1958年的自动控制年会上发表了有关VR型步进电机的论文。步进电机的国际性学会在1970年成立,在美国的伊利诺大学找来了第一次IMCSD(IncrementalMotionControlSystemsandDevices)大会。此次大会由伊利诺大学的BCKuo教授主板,美国的WarnerElectric公司于Westool公司协办。发表的论文约2/3来源于企业界,剩下的1/3来源于大学方面。作者的第26届与第29届的IMCSD也发表了有关步进电机的论文。在IMSCD发表的论文中,有很多是关于步进电机的,从中能了解步进电机的最前沿技术和研究动态,美国的学者和技术人员对步进电机进行了广泛的研究。